事業案内 / 自動化設備・省力化機械分野
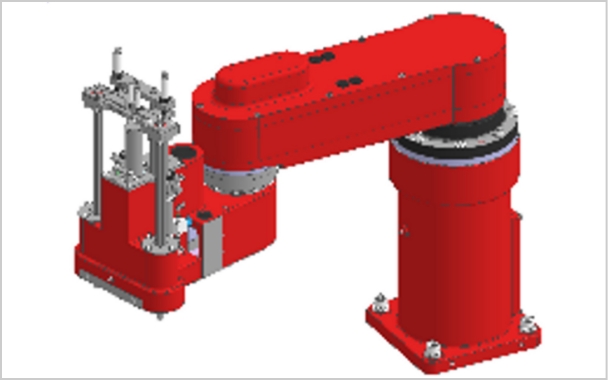
インサート成形専用ロボットPUHA
- TOP
- 事業案内
- 自動化設備・省力化機械分野
- インサート成形専用ロボットPUHA
世界で唯一のインサート成形専用ロボット
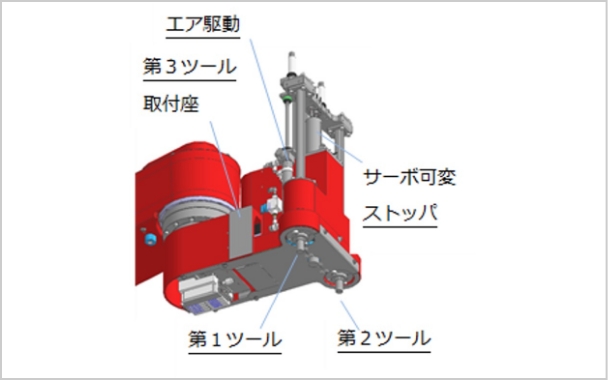
インサートに適したエア駆動&サーボ可変ストッパ構造によるダブルツールを世界で唯一、標準搭載することによりサイクルタイム短縮を実現しました。(オプションでトリプルツールが搭載可能)
高可搬質量でも高速・高精度な作業が可能
複数の部品供給や複雑な動きが必要な工程にも柔軟に対応
大型ハンドも搭載可能な可搬質量10kg。この高可搬質量でも、繰り返し精度は±0.02mmという高精度を実現しました。さらに、最大速度6000mm/secという高速作業が可能です。 これらの特性により、複雑な動きをするアクチュエータを配した大型ハンドの搭載が可能となり、複数の部品のインサート(例えば8個取りの金型用に8個の部品を1往復にてインサート)や、挿入向きの変更、挿入途中からの押し込み方法の変更など複雑な動きが必要なインサートにも対応可能です。
長寿命設計でランニングコストを削減
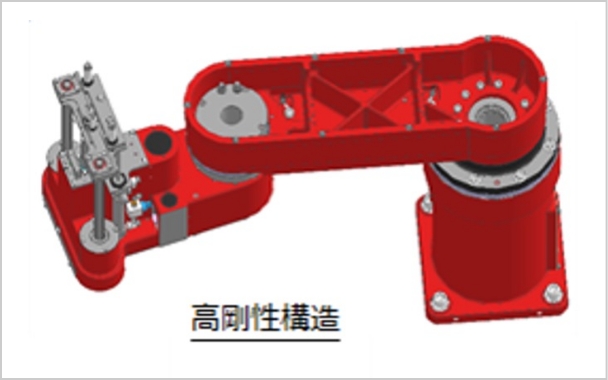
極めて剛性の高いメカ構造を採用
インサート成形に使用する複雑で巨大なハンドを保持するため、極めて剛性の高いメカ構造を採用しました。これにより、他社製スカラロボットと比較して、長寿命化を実現しています。
インサート成形にて複数の部品をインサートする場合、複雑で大きなハンドが必要です。
この大きなハンドを保持しつつ、金型挿入時の反力にも耐える為に高剛性のメカ構造を採用しています。
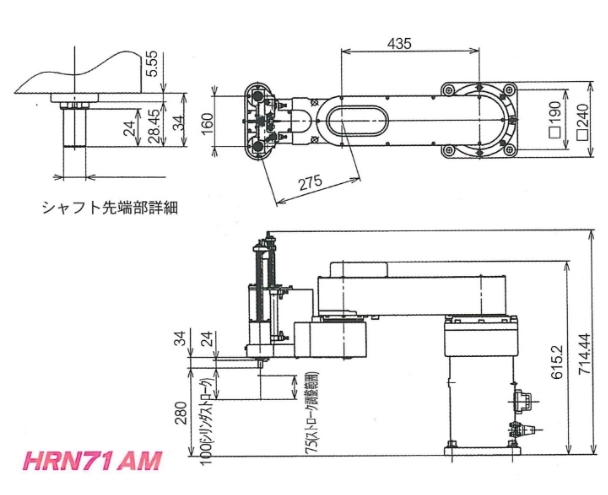
基本仕様
| 製品 | HRN55AM | HRN71AM | |
|---|---|---|---|
| 制御軸数 | 4軸ACサーボモーター | ||
| 動作範囲 | 肩旋回 | 作業エリア240°(メカストッパー265°) | |
| 肘旋回 | 作業エリア206°(メカストッパー230°) | ||
| 上下ストローク | 100mm | ||
| 手首旋回 | 360° | ||
| 可搬質量 | 最大10kg(ハンド+ワーク) | ||
| 繰り返し精度 | ±0.02mm | ||
| 最大速度 | 5500mm/sec | 6000mm/sec | |
| 本体質量 | 43kg | 47kg | |
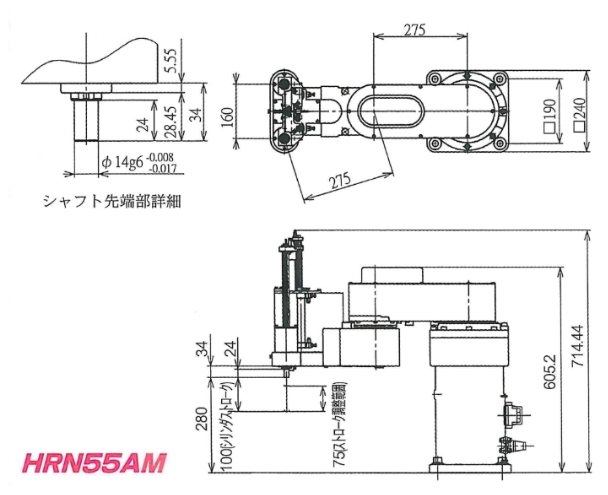
※拡大してご覧ください